
") 樓宇對(duì)講公眾號(hào)
樓宇對(duì)講公眾號(hào)
備管理平臺(tái)") 智能硬件公眾號(hào)
智能硬件公眾號(hào)


科麗圖車輛識(shí)別系統(tǒng)-純車牌硬識(shí)別管理系統(tǒng)
來(lái)源:未知
作者:admin
日期:2017-02-24 10:00
瀏覽量:
隨著城鎮(zhèn)化的加速和人民生活水平的提高,小車加速普及,車位一位難求成為常態(tài),停車場(chǎng)管理也面臨全新難題:不僅大型商業(yè)停車場(chǎng)面臨快速進(jìn)場(chǎng)和收費(fèi)難問(wèn)題,普通小區(qū)也面臨越來(lái)越多的臨時(shí)車輛,也需要對(duì)臨時(shí)車輛進(jìn)行收費(fèi)管理,以提高利用效率。作為迎來(lái)送往第一站的停車場(chǎng)扮演著更加重要的窗口角色。
車牌識(shí)別停車場(chǎng)系統(tǒng)正是為解決傳統(tǒng)停車場(chǎng)的不足所誕生的,贏得大量客戶贊譽(yù)。其優(yōu)勢(shì)在于車牌識(shí)別則對(duì)準(zhǔn)確識(shí)別車牌,并快速放行,高效進(jìn)出場(chǎng),有效管理收費(fèi),尤其是對(duì)外來(lái)臨時(shí)車輛快速進(jìn)出場(chǎng)且準(zhǔn)確收費(fèi)提供了極為科學(xué)的管理。
科麗圖智能車牌識(shí)別系統(tǒng)是采用車牌識(shí)別技術(shù)做為基礎(chǔ),是計(jì)算機(jī)視頻圖像識(shí)別技術(shù)在車輛牌照識(shí)別中的一種應(yīng)用,即從圖像信息中將車牌號(hào)碼提取并識(shí)別出來(lái)。通過(guò)攝像機(jī)拍攝道路上行駛的車輛圖像進(jìn)行車牌號(hào)碼的識(shí)別,過(guò)程涉及:車輛檢測(cè)——圖像采集——預(yù)處理——車牌定位——字符分割——字符識(shí)別——結(jié)果輸出,現(xiàn)已廣泛應(yīng)用于停車場(chǎng)、高速路口、收費(fèi)通道等場(chǎng)所。
車牌識(shí)別停車場(chǎng)系統(tǒng)正是為解決傳統(tǒng)停車場(chǎng)的不足所誕生的,贏得大量客戶贊譽(yù)。其優(yōu)勢(shì)在于車牌識(shí)別則對(duì)準(zhǔn)確識(shí)別車牌,并快速放行,高效進(jìn)出場(chǎng),有效管理收費(fèi),尤其是對(duì)外來(lái)臨時(shí)車輛快速進(jìn)出場(chǎng)且準(zhǔn)確收費(fèi)提供了極為科學(xué)的管理。
科麗圖智能車牌識(shí)別系統(tǒng)是采用車牌識(shí)別技術(shù)做為基礎(chǔ),是計(jì)算機(jī)視頻圖像識(shí)別技術(shù)在車輛牌照識(shí)別中的一種應(yīng)用,即從圖像信息中將車牌號(hào)碼提取并識(shí)別出來(lái)。通過(guò)攝像機(jī)拍攝道路上行駛的車輛圖像進(jìn)行車牌號(hào)碼的識(shí)別,過(guò)程涉及:車輛檢測(cè)——圖像采集——預(yù)處理——車牌定位——字符分割——字符識(shí)別——結(jié)果輸出,現(xiàn)已廣泛應(yīng)用于停車場(chǎng)、高速路口、收費(fèi)通道等場(chǎng)所。

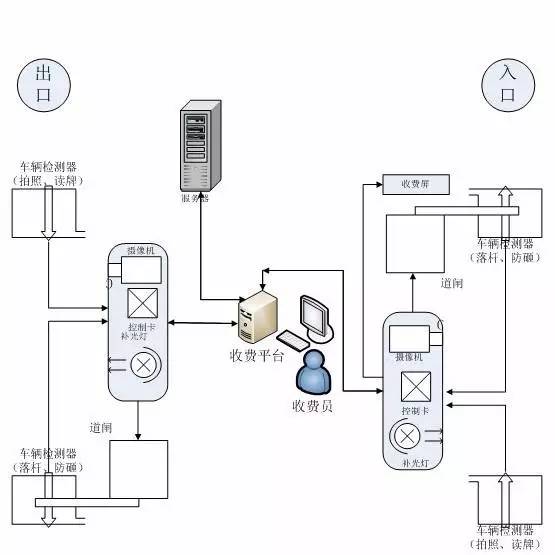
系統(tǒng)拓?fù)鋱D
收費(fèi)管理軟件


科麗圖車牌識(shí)別的原理
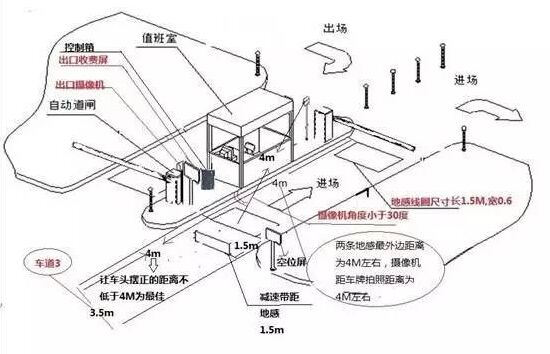
車輛檢測(cè):可采用埋地線圈檢測(cè)、視頻檢測(cè)等多種方式感知車輛的經(jīng)過(guò),并觸發(fā)圖像采集抓拍。
圖像采集:通過(guò)高清攝像抓拍主機(jī)對(duì)通行車輛進(jìn)行實(shí)時(shí)、不間斷記錄、采集。
預(yù)處理:噪聲過(guò)濾、自動(dòng)白平衡、自動(dòng)曝光以及伽馬校正、邊緣增強(qiáng)、對(duì)比度調(diào)整等。
車牌定位:在經(jīng)過(guò)圖像預(yù)處理之后的灰度圖像上進(jìn)行行列掃描,確定車牌區(qū)域。
字符分割:在圖像中定位出車牌區(qū)域后,通過(guò)灰度化、二值化等處理,精確定位字符區(qū)域,然后根據(jù)字符尺寸特征進(jìn)行字符分割。
字符識(shí)別:對(duì)分割后的字符進(jìn)行縮放、特征提取,與字符數(shù)據(jù)庫(kù)模板中的標(biāo)準(zhǔn)字符表達(dá)形式進(jìn)行匹配判別。
結(jié)果輸出:將車牌識(shí)別的結(jié)果以文本格式輸出。
圖像采集:通過(guò)高清攝像抓拍主機(jī)對(duì)通行車輛進(jìn)行實(shí)時(shí)、不間斷記錄、采集。
預(yù)處理:噪聲過(guò)濾、自動(dòng)白平衡、自動(dòng)曝光以及伽馬校正、邊緣增強(qiáng)、對(duì)比度調(diào)整等。
車牌定位:在經(jīng)過(guò)圖像預(yù)處理之后的灰度圖像上進(jìn)行行列掃描,確定車牌區(qū)域。
字符分割:在圖像中定位出車牌區(qū)域后,通過(guò)灰度化、二值化等處理,精確定位字符區(qū)域,然后根據(jù)字符尺寸特征進(jìn)行字符分割。
字符識(shí)別:對(duì)分割后的字符進(jìn)行縮放、特征提取,與字符數(shù)據(jù)庫(kù)模板中的標(biāo)準(zhǔn)字符表達(dá)形式進(jìn)行匹配判別。
結(jié)果輸出:將車牌識(shí)別的結(jié)果以文本格式輸出。
|
項(xiàng)目 |
參數(shù) |
|
車牌識(shí)別率 |
>98% |
|
車牌定位率 |
>99% |
|
識(shí)別要素 |
車牌號(hào)碼、車牌顏色、識(shí)別速度等 |
|
車牌寬度范圍 |
80-400 像素 |
|
識(shí)別速度 |
100 —200毫秒 |
|
相機(jī)啟動(dòng)時(shí)間 |
30 秒 |
|
圖像調(diào)節(jié) |
AGC 、AEC |
|
車輛通行速度 |
<30 公里/小時(shí) |
|
工作模式 |
虛擬地感線圈觸發(fā)拍照識(shí)別 |
|
操作系統(tǒng) |
Windows 2000/XP/2003/ 7 |
工程案例


